——从二维 Offset 到三维区域求解
在建模软件里,Inset Face 看起来是一个很小的操作:选中一个面,拖一下厚度,轮廓往里缩一圈;如果再给一点 Depth,它就变成一个凹进去或者凸出来的结构。
但话又说回来,如果觉得 inset 就是简单地把所有点往中间拽一拽,肯定是没有这么容易的。
这篇文章记录了我实现 InsetFace 插件时的工程落地思路。btw,这次实现并非什么学术级的 Mesh Offset 系统,而是一套更偏向交互式建模的实用方案:核心原则是“常见情况保证正确,复杂拓扑给出可控近似,极端情况下优先保证预览不炸”。整体思路参考了 Blender 和 Maya 的 Inset 行为。如果你正打算搓一个生产级的实现,这篇文可以帮你踩踩坑,不过最稳妥的办法还是直接去啃这些成熟软件的源码和数据结构设计。
如果只处理一个平面多边形,inset 的定义其实很清楚:每条边向内部平移一段距离,然后相邻平移边求交,得到新的内轮廓。
麻烦在于建模软件里的面不是孤立的二维多边形。它们在三维空间里,可能多个面连成一个区域,区域还可能不是共面的。Thickness 到底表示顶点移动距离,还是边到边的真实距离,也会影响最后的算法分支。
我最后把实现拆成了三层:
- 单面 inset
把 3D 面投影到局部 2D 平面,在 2D 里做 polygon offset,再抬回 3D。 - 普通区域 inset
每个面先做局部 inset,然后把共享顶点的切向位移做加权融合。 - 区域 EvenOffset inset
如果区域近似共面,就做统一的 2D 区域 offset;如果明显非共面,就走曲面感知的 3D 切向近似。
所以这个插件的核心大概可以写成:
InsetFace=2D polygon offset+local frame projection+half-edge boundary extraction+tangent displacement smoothing 这几个部分听起来分散,但实现里基本就是围绕这条线组织的。
 3D - 2D Offset - 3D
3D - 2D Offset - 3D单个面 inset 最适合先变成 2D 问题。给定面顶点:
x0,x1,…,xn−1 先计算面法线。我这里用的是 Newell 风格的多边形法线累积:
nx+=(yi−yi+1)(zi+zi+1) ny+=(zi−zi+1)(xi+xi+1) nz+=(xi−xi+1)(yi+yi+1) 然后归一化:
n=∥n∥n 局部坐标系用面上的第一个点作为原点:
o=x0 再找一条有效边作为 u 方向:
u=∥x1−x0∥x1−x0 第二个基向量由法线叉乘得到:
v=n×u 这样三维点 x 就可以投影成二维坐标:
q=[(x−o)⋅u(x−o)⋅v] 二维 offset 得到新点 q′ 后,再回到 3D:
x′=o+qx′u+qy′v+dn 这里的 d 对应用户输入的 Depth。
单面流程可以概括成:
3D 多边形
→ 计算局部平面
→ 投影到 2D
→ 2D offset
→ 反投影回 3D
→ 沿法线加 Depth
这个路径后面会反复用到。区域算法看起来更复杂,但底层依然依赖稳定的局部 2D offset。
这里是真正实现轮廓偏移的地方。
OffsetLoop2D() 是整个实现里最核心的函数。输入是二维闭合多边形:
P={p0,p1,…,pn−1} 输出是内缩后的多边形:
P′={p0′,p1′,…,pn−1′} 首先要判断多边形方向。二维有向面积为:
A(P)=21i=0∑n−1cross(pi,pi+1) 其中:
cross(a,b)=axby−aybx 如果 A(P)>0,多边形是逆时针;如果 A(P)<0,则是顺时针。
为了后面统一处理,我用了一个方向符号:
s={1,−1,A(P)≥0A(P)<0 对当前顶点 pi,取前后两条边的单位方向:
d0=∥pi−pi−1∥pi−pi−1 d1=∥pi+1−pi∥pi+1−pi 二维左法向定义为:
perpLeft(x,y)=(−y,x) 于是两条边的 inward normal 写成:
n0=s⋅perpLeft(d0) n1=s⋅perpLeft(d1) 接下来分两种情况:普通 inset 和 Offset Even。
不开启 Offset Even 时,我用的是比较轻的方案:顶点沿相邻两条边 inward normal 的角平分方向移动。
角平分方向为:
b=∥n0+n1∥n0+n1 新顶点为:
pi′=pi+tb 这里 t 是 Thickness。
这个模式下,Thickness 更接近“顶点沿角平分线移动的距离”,不是严格的边到边距离。
如果该顶点的内角是 θ,实际边距大致是:
dedge≈tcos2θ 所以钝角处的实际边距会比输入厚度小,锐角处则会显得收缩更明显。这也是普通 inset 和 Offset Even 看起来不一样的原因。
这条路径的价值在于简单、快,而且稳定。作为交互式工具的默认轻量分支,它比较合适。
开启 Offset Even 后,Thickness 应该更接近真实的边距。这个时候不能只推顶点,而要平移边线。
 Regular Inset vs Offset Even
Regular Inset vs Offset Even对当前顶点 pi,相邻两条边分别沿 inward normal 平移 t,得到两条偏移线:
L0(α)=(pi+tn0)+αd0 L1(β)=(pi+tn1)+βd1 新顶点是这两条线的交点:
(pi+tn0)+αd0=(pi+tn1)+βd1 这个点满足:
dist(pi′,Ei−1)≈t dist(pi′,Ei)≈t 也就是说,Offset Even 的语义更接近传统建模软件里的等距 inset。
但它也更容易遇到数值问题。两条边接近平行时,交点会跑得很远;角很尖时,miter 也可能被拉成一根长刺。所以这里必须加限制。
Offset 里的尖角很麻烦。两条偏移线夹角太小时,求出来的交点可能离原顶点非常远,形成一个夸张的 miter。
我的处理是:如果直接求交失败,或者结果不稳定,就退回到角平分线方向。
角平分方向仍然是:
b=∥n0+n1∥n0+n1 理论上的 miter 长度为:
ℓ=b⋅n1t 候选点为:
pi′=pi+ℓb 但实际实现里会限制长度:
∣ℓ∣≤∣t∣M 普通模式使用:
M=8.0 Offset Even 模式使用:
M=12.0 这两个数不是推导出来的,是工程里调出来的。太小会把尖角削得很平,太大又容易把预览拉飞。现在这个范围能保留一定锐利感,也不会让单个极端角把整个轮廓弄坏。
二维 offset 得到的候选轮廓不一定可用。厚度过大时,多边形可能塌缩、自交,甚至方向翻转。凹多边形和窄长面尤其容易出问题。
所以 OffsetLoop2D() 生成候选轮廓后,我会做几类检查。
面积不能接近零:
∣A(P′)∣>ε 方向不能翻转:
sign(A(P′))=sign(A(P)) 同时还要检查不能自交。
如果检查失败,我没有让它直接报错,而是缩小厚度后重试,最多尝试 8 次:
tk+1=0.5tk
有了单面 inset,Individual 模式就比较直接,每个面独立内插即可。每个选中面独立执行:
取面顶点
→ 计算面法线
→ 建立局部 2D 坐标
→ OffsetLoop2D
→ 抬回 3D
→ 生成内盖和侧壁
对面 f 中的顶点 i,最终位置可以写成:
xf,i′=of+qf,i,x′uf+qf,i,y′vf+dnf 这个模式局部稳定,特别适合多个不共面的独立面。
它的限制也很直接:两个相邻面如果共享一条边,各自独立 inset 后,新边不一定协调。区域模式就是为了解决这个问题做的。
在 Region 模式下,如果没有开启 Offset Even,我没有直接把整个区域压到一个平面里做 offset。原因很简单:区域一旦不是共面,投影平面上的距离就不再可靠,做出来的 inset 会带明显变形。
这里采用的做法是:每个面先局部 inset,得到局部位移;然后把这些位移投影到顶点切平面,再对共享顶点做加权融合。
对面 f 中的顶点 v,局部 inset 给出:
xf,vinset 局部位移为:
Δxf,vlocal=xf,vinset−xv 由于不同面法线不一样,这个位移里可能混有不一致的法向分量。于是先投影到顶点平均法线对应的切平面。
设顶点平均法线为:
nv 切向位移为:
Δxf,vtan=Δxf,vlocal−(Δxf,vlocal⋅nv)nv 权重用顶点处的角度。某个面在这个顶点占的角越大,它对最终位移的贡献也应该越大:
wf,v≈∠(eprev,enext) 最终共享顶点的切向位移为:
Δxvtan=∑fwf,v∑fwf,vΔxf,vtan 新位置为:
xv′=xv+Δxvtan+dnv 这个方法不是严格的区域 offset。它做的是在每个顶点的切空间里融合局部 inset 结果。精度上有妥协,但稳定性不错,尤其适合普通区域 inset 的交互预览。
Region + EvenOffset 是最绕的一条分支。
我早期版本这里处理得比较简单:只要用户开启均等偏移,就把整个选中区域投影到一个统一的 2D 平面里,算完 offset 后再抬回 3D。平面模型上这套方案看着没什么问题,轮廓也干净,所以一开始我没有特别想过它。
问题是插件发给别人试用后才暴露的。他拿了一个带折角的区域测试,结果折角附近的 inset 边界偏到了不该去的位置,侧壁也开始出现不协调的扭曲。下面这张图就是当时的效果。
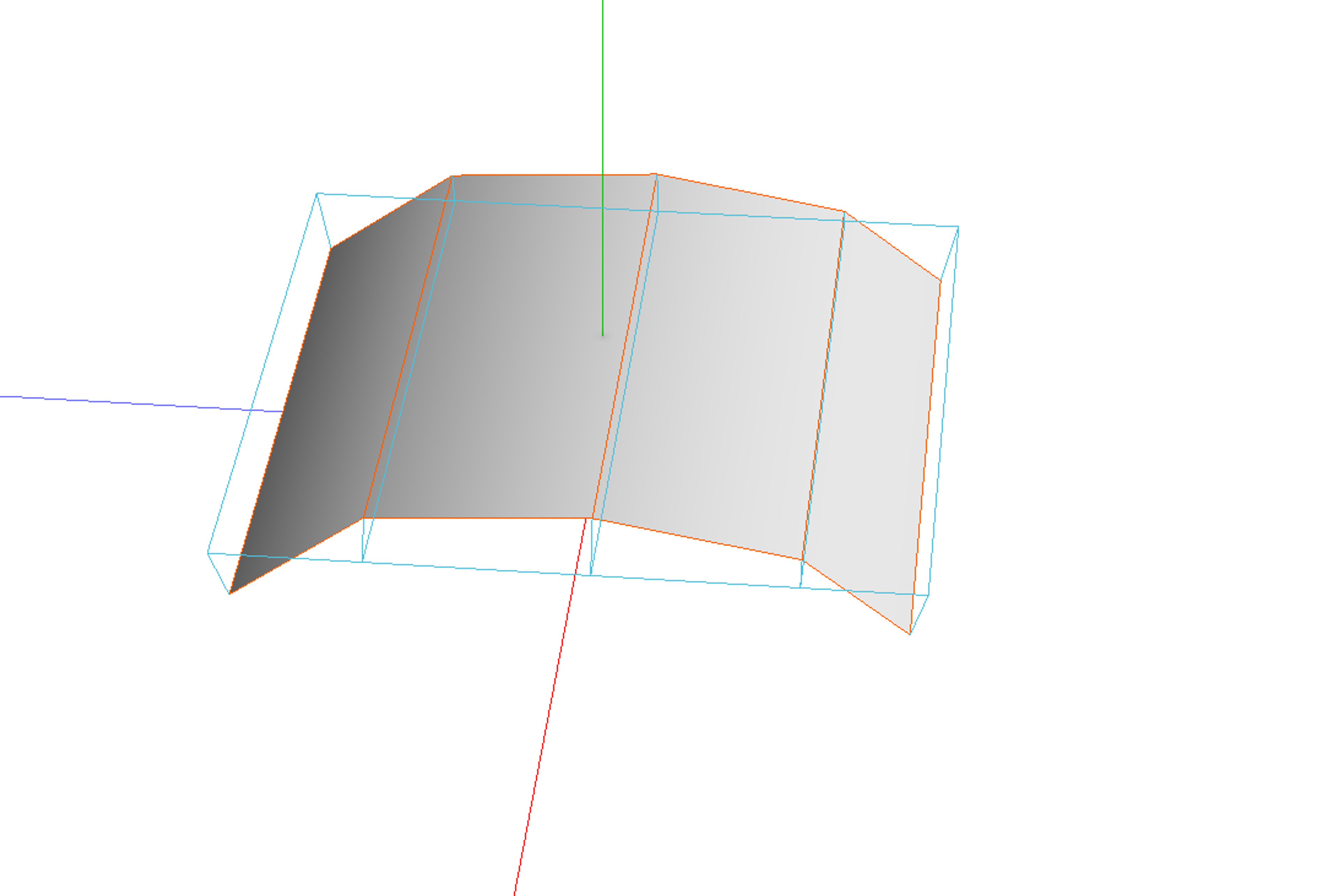
这个 bug 的根源不在 OffsetLoop2D()。2D 里的等距偏移本身没有算错,真正的问题是统一投影这一步把折角处的局部切空间信息抹掉了。
早期做法相当于把所有切向位移都限制在同一个区域平面 Tregion 上:
Δxi2D=(qi,x′−qi,x)u+(qi,y′−qi,y)v 这个位移满足的是区域平面上的 offset 语义。可是在折角处,同一个共享顶点周围会有多个局部面,它们的切平面并不一致。先把这些面压到同一个 2D 平面里,再把结果抬回去,本质上就是用一个全局切平面替代了局部切空间。
这里还有一个容易误判的点:即使 Depth 最后仍然沿顶点平均法线加上去,问题也不会自动消失。因为 Thickness 对应的切向收缩方向已经在投影阶段被改写了。最后看到的侧壁扭曲,其实是前面边界目标位置就已经偏了。
所以后来我把 Region + Offset Even 拆成现在的两条路径:
- 近共面区域继续走统一 2D offset,因为这时投影误差还在可控范围内;
- 非共面区域不再强行压平,而是先用局部面 even inset 生成边界目标,再把位移投影到顶点切平面里传播。
这也是后面 nearly planar 判断存在的原因。它不是为了让流程更复杂,而是为了避免在折角、弯曲区域里误用单一投影平面。这个坑也提醒我,建模操作里很多“看起来可以统一成 2D 问题”的地方,最好先检查一下局部切空间有没有被一起丢掉。
区域中心取所有顶点的平均:
c=N1i=1∑Nxi 区域法线用面积加权的面法线平均:
n=f∑Afnf 归一化:
n=∥n∥n 然后从区域中找最长边方向,投影到该平面作为 u,再计算:
v=n×u 这样就得到区域级的局部坐标系。
我用了两个指标判断区域是否足够接近平面:
- 顶点到区域平面的最大距离;
- 面法线和区域法线的最大夹角。
设有效厚度为:
teff=max(∣t∣,10−4) 只有同时满足:
dmax≤0.25teff 以及:
θmax≤8∘ 才认为它是 nearly planar。
这个阈值也是偏工程的选择。直觉上,如果区域起伏相对 inset 厚度很小,把它压到一个 2D 平面里求 offset 是可以接受的。反过来,如果区域本身已经明显弯曲,统一投影就会制造更大的误差。
整体思路为边界 Offset + Laplace 插值。
对 near planar 区域,先把所有区域顶点投影到统一 2D 平面:
qi=[(xi−c)⋅u(xi−c)⋅v] 然后用半边结构提取区域边界。
半边结构做这件事很顺手:如果一条半边在选中区域内部有 pair,它就是内部边;如果没有对应的区域内 pair,它就在区域边界上。沿这些边界半边继续追踪,就能得到一个或多个闭合边界环。
这里要处理孔洞。外边界和孔洞的 offset 方向相反:
对外边界:
tloop=t 对孔洞:
tloop=−t 然后每个边界环调用:
OffsetLoop2D(loop, t_loop, true)
边界点有了目标位置后,内部点还要跟着移动。当前实现里,我固定边界,对内部点做邻接平均迭代。对内部点 i:
qi(k+1)=∣N(i)∣1j∈N(i)∑qj(k) 边界点固定不动,内部点迭代更新。
这相当于近似求解离散 Laplace 方程:
Δq=0 也就是 harmonic interpolation。
这里没有显式构造稀疏矩阵,而是用了固定次数的 Jacobi 型迭代。它不是最高效、最严格的线性系统解法,但实现简单,预览阶段也足够稳。
得到新的 2D 位置后,再回到 3D:
xi′=c+qi,x′u+qi,y′v+dni Depth 这里用的是顶点平均法线 ni,不是统一的区域法线。这样轻微弯曲的区域看起来会自然一些。
如果区域不满足近共面条件,采用曲面感知的近似路径,不再把它硬投影到一个平面里。
这条路径的思路是:边界点由局部面 even inset 结果给出,内部点通过 3D 切向平滑传播。
先对每个相邻面做局部 even inset,得到边界顶点在每个面里的局部 inset 位置:
xf,vinset 局部位移为:
Δxf,vlocal=xf,vinset−xv 然后投影到顶点切平面:
Δxf,vtan=Δxf,vlocal−(Δxf,vlocal⋅nv)nv 再用角度权重融合,得到边界目标位移:
Δxvboundary=∑fwf,v∑fwf,vΔxf,vtan 边界位移固定后,内部点在 3D 里迭代传播位移。
对内部顶点 i:
Δxi(k+1)=ΠTi∣N(i)∣1j∈N(i)∑Δxj(k) 其中 ΠTi 表示投影到顶点 i 的切平面:
ΠTi(a)=a−(a⋅ni)ni 最终位置为:
xi′=xi+Δxitan+dni 这不是严格的 geodesic offset。严格曲面 offset 要处理测地距离、曲率、局部参数化和拓扑变化,在任意三角网格上会复杂很多。
但作为建模插件里的交互路径,这个近似比较实用:它不会因为区域轻微弯曲就失效,也不会把所有点强行压到一个平面里。当前实现里,如果这条曲面感知路径失败,会回退到普通 patch inset,而不是直接报错。
这个插件里还有一个比较重要的工程结构:预览和提交分离。
预览阶段不会直接改原始网格,而是构建临时结构 TempRegion,里面保存:
- 临时顶点;
- 临时半边;
- 临时面;
- 边界环;
- 区域平面;
- inset 后的目标位置。
预览只生成可视化线条,比如新内轮廓边、原边界点到新边界点的连接线。
这个设计很实际。用户拖动参数时,插件可能一秒钟重建很多次结果。如果每次都直接写回真实拓扑,撤销、回滚、法线更新、坏几何清理都会变得麻烦。临时结构让预览轻很多,也能避免中间状态污染原始网格。
提交阶段才真正写回拓扑,大致流程是:
- 创建 inset 后的新顶点;
- 用新顶点生成内盖面;
- 用原边和新边生成侧壁四边形;
- 删除原始选中面;
- compact 网格;
- 更新法线。
侧壁四边形的顶点顺序是:
[xstartorig,xendorig,xendnew,xstartnew] 这样可以自然连接原边界和新内边界,同时保持面朝向一致。
写这类工具时经常会遇到一个 trade-off:到底要追求几何上更严格的 offset,还是先保证交互过程稳定、快速、可预期。
当前实现里有不少 trade-off:
- 内部点使用固定次数邻接平均,而不是精确稀疏线性系统;
- 非共面
Offset Even 是曲面感知近似,不是严格测地 offset; - UV 目前只做轻量处理,没有重新做完整参数化;
- 自交处理采用缩小厚度重试,而不是完整 polygon clipping。
不用说,这些确实是目前插件的限制。但对这个插件来说,首先面对的是交互场景。用户拖动参数时算法要快;普通模型上结果要稳定;遇到局部坏几何时最好有 fallback;一个极端顶点不应该让整个操作崩掉。
所以它更像一个工程化的 inset solver,而不是一个完整的 polygon offset 或 mesh parameterization 系统。近似是存在的,但尽量放在能解释、能控制的位置。
InsetFace 的决策结构大致如下:
InsetFace
│
├── Individual
│ └── 每个面独立:
│ 3D 面 → 局部 2D → OffsetLoop2D → 回到 3D
│
└── Region
│
├── EvenOffset = false
│ └── 每面局部 inset
│ → 位移投影到顶点切平面
│ → 角度加权平均
│
└── EvenOffset = true
│
├── nearly planar
│ └── 区域统一投影到 2D
│ → 提取边界环
│ → 边界 even offset
│ → 内部 Laplace 平滑
│ → 回到 3D
│
└── nonplanar
└── 局部面 inset 生成边界目标
→ 3D 切向位移平滑
→ 加 Depth



